


在自駕車技術日益成熟的今天,科學家們最近展示一種令人驚訝的技術,利用鏡子來欺騙自駕車的感應系統。來自法國和德國的研究團隊在一所大學的停車場進行了實驗,成功地使一輛裝有光學雷達(LiDAR)系統的自駕車無法辨識障礙物,甚至在面對不存在的物體時做出意外的煞車反應。
光學雷達做為現今多數高階自駕車(L4及以上)不可或缺的感測核心,藉由發射雷射脈衝並測量反射時間,重建周遭三維環境,為決策提供精確數據。據市場研究機構預測,2025年全球車用LiDAR市場規模將達24億至29億美元,主要供應商包括Velodyne、Valeo、Luminar等國際大廠。
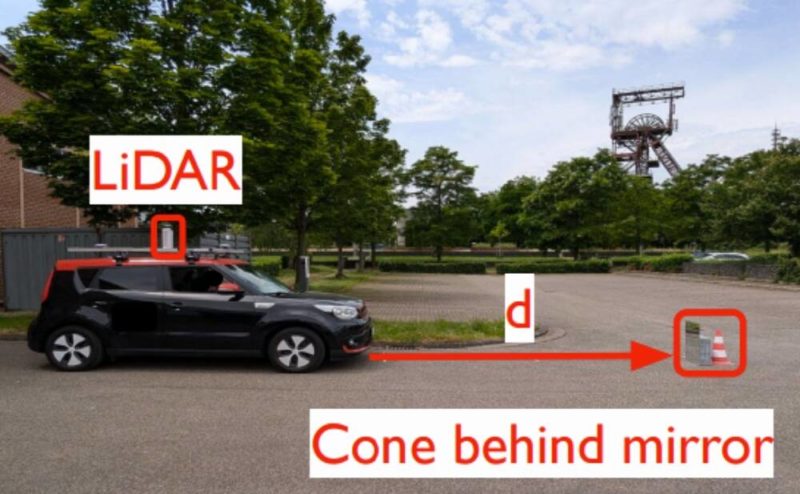
LiDAR系統是大多數自駕車的核心技術(特斯拉除外),它透過雷射脈衝來測量周圍環境,但對於反射表面卻常常無法有效辨識。研究團隊利用不同大小的鏡子來覆蓋交通錐,透過調整鏡子的大小和位置,成功使LiDAR系統完全無法檢測到這些障礙物。

這項技術被稱為物體移除攻擊(Object Removal Attack,ORA),而另一種技術則是物體添加攻擊(Object Addition Attack,OAA),該技術使用小鏡子來創造虛假的障礙物。當自駕車在手動控制下行駛時,它能夠在20米外辨識出這些虛假的障礙物並進行避讓。
研究人員在其提交給《計算機與安全》期刊的論文中指出,這些技術展示了如何利用鏡子的反射物理特性來創造虛假障礙物或隱藏真實障礙物,並警告這些攻擊可能導致自駕車的安全失效,例如突然的緊急剎車或未能讓行。
在多種場景下進行的測試中,OAA技術成功地使自駕車在交通中無法合法轉彎,使用兩面鏡子時成功率達到65%,而使用六面鏡子時成功率更是上升至74%。
此外,研究團隊還提出一些防禦措施,包括熱成像技術,因為實體物體通常具有特定的熱簽名。然而,作者警告說,將熱成像技術與LiDAR結合並不是萬能的,特別是在高溫環境中對小物體的識別上。
儘管這項研究展示了鏡子在自駕車安全中的潛在威脅,但研究團隊也指出,他們的測試速度遠低於高速公路上行駛的車輛,因此仍需進一步測試,以確定這些廉價的鏡子是否會對未來的自駕車服務構成實際威脅。
(圖片來源:論文)





