


麻省理工學院(MIT)研究人員透過 3D 列印技術,重新實現一項已有 40 年歷史的三角形拉鍊概念,即所謂的「Y 型拉鍊」(Y-Zipper),這種拉鍊可用於製造變形機器人與可展開式結構,能將柔軟的觸手狀結構變成堅硬的樑柱。
MIT 電腦科學與人工智慧實驗室(CSAIL)研究團隊開發出一種三邊式拉鍊機構,可在數秒內將 3D 列印的柔性結構轉變為具承重能力的剛性結構。這種 Y 型拉鍊結構能快速組裝成樑柱、拱形結構、機器人肢體與可展開式框架,未來有望應用於自適應機器人、快速部署式帳篷,以及可重新配置的醫療裝置。
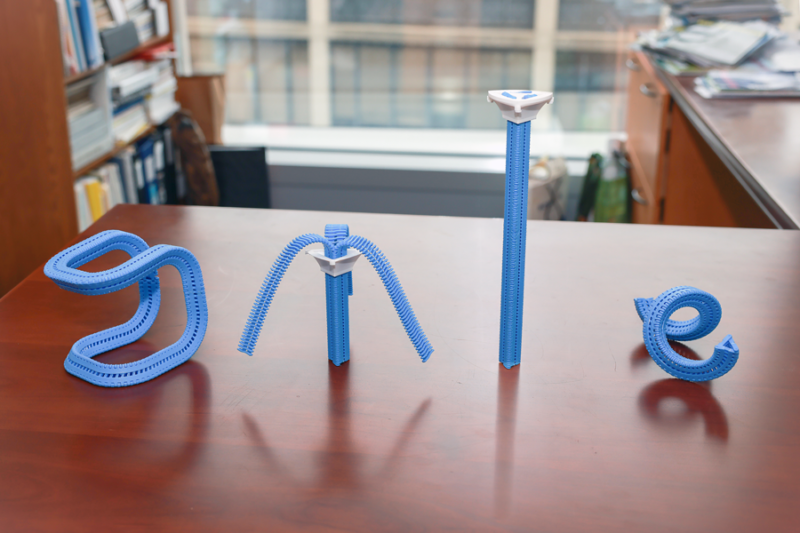
跟傳統 2D 結構不同,Y 型拉鍊能將三條柔性支臂結合成一個剛性的 3D 三角形管狀結構。當拉鍊打開時,整體結構就像柔軟塑膠條或軟觸手,每條支臂都能獨立彎曲與扭轉;一旦透過專用滑塊將其拉合,三條支臂便會互相咬合,形成類似樑柱的堅硬結構,可承受外部載重。
這個概念最早由 MIT 教授 William Freeman 於 1985 年提出。他當時構想利用三角形拉鍊系統快速組裝帳篷、家具與容器等物件,雖然申請了專利,但受限於當時製造技術不足,設計始終無法實現。近四十年後,隨著 3D 列印與計算設計工具成熟,研究人員終於有機會實現這項構想。
CSAIL 團隊也開發了軟體,讓使用者能自訂拉鍊閉合後的結構行為。根據支臂設計不同,系統可形成直桿、拱形、螺旋狀甚至類似螺絲的扭曲結構。整套系統,包括三條支臂與滑塊,皆以常見聚合物材料透過 3D 列印一次成形。
這種能在柔軟與剛硬狀態間切換的能力,對機器人與可展開式系統特別重要。該團隊也測試 Y 型拉鍊在可展開式結構中的應用,其中一項展示是快速組裝帳篷結構,三邊拉鍊同時扮演支撐骨架與連接系統。研究人員指出,搭建時間從原本約六分鐘縮短至一分二十秒,因為拉鍊能直接讓整體結構卡入定位。
研究團隊展示了 Y 型拉鍊用於機器人和可調式手腕護具的可能性。此外,經耐久測試顯示,該機構可承受約 18,000 次拉合循環後才出現故障。研究人員表示,其彈性結構能將應力分散至整個系統,而非集中於單一位置,因此提升耐用度。
研究人員也提出航太應用可能性,包括可展開式太空結構,以及能在探測任務中抓取岩石樣本的機器人系統。目前該研究已於四月發表,論文題為《Y-Zipper: 3D Printing Flexible–Rigid Transition Mechanism for Rapid and Reversible Assembly》。
- It took 40 years for technology to catch up to this zipper design
- MIT researchers revive 40-year-old triangular zipper concept now made possible by 3D printing, creates shape-shifting robots and deployable structures — 3D-printed ‘Y-Zipper’ turns floppy tentacles into rigid beams in seconds
(首圖來源:MIT)





